機械社会にオープン性を根付かせる――OpenMind は精神と秩序を一体化します
AIエージェントだけでなく、実体を持つロボットはAI時代における重要な応用分野の一つです。モルガン・スタンレーは、2050年までに世界のヒューマノイドロボット市場が5兆ドルを超えると予測しています。
AIが発展する中で、ロボットはかつての工場用アームから、私たちの日常を共にするパートナーへ進化しつつあります。AIによって知覚し、状況を理解し、独立した意思決定能力まで獲得し始めています。しかし、現状のロボットには標準化された通信プロトコルがなく、各メーカーが独自の言語やロジックで開発しているため、ソフトウェアも互換性がなく、知能も相互利用できません。まるで別メーカーの車とテスラを両方所有していても、道路状況の共有やタスクの協働が全くできないようなものです。
OpenMindは、この断片的な現状を変えようとしています。同社はロボットの製造自体は行わず、代わりにロボットが共通言語で対話し、共通のルールに従って協働し、タスクを共同で完了できるコラボレーションシステムの構築に注力しています。iOSやAndroidがスマートフォンアプリの爆発的拡大を実現し、Ethereumが暗号資産領域の共通基盤となったように、OpenMindはロボットのための統一「オペレーティングシステム」と「協働ネットワーク」の世界的な構築を目指しています。
要するに、OpenMindはロボット向けのユニバーサルOSを開発し、ロボットが知覚し行動するだけでなく、分散型調整によってあらゆる環境で安全かつ大規模な協働が可能となる基盤を築いています。
このオープンプラットフォームを支援する勢力
OpenMindは、Pantera Capital主導のもと、シード・シリーズAラウンドで2,000万ドルの資金調達を完了しました。重要なのは「資本の幅広さと補完性」により、この分野の重要なパートナーが結集した点です。一方にはRibbit、Coinbase Ventures、DCG、Lightspeed Faction、Anagram、Pi Network Ventures、Topology、Primitive Venturesといった欧米テクノロジー・金融系投資家が、暗号・AIインフラのパラダイム転換を理解し、「エージェントエコノミー+マシンインターネット」のモデル・ネットワーク・コンプライアンスで専門的支援を提供。もう一方には、セコイア・チャイナのサプライチェーンや製造システムを代表とするアジアの産業が、プロトタイプを量産可能な製品へと進化させるための技術基準とコスト要件を把握しています。これらの連携により、OpenMindは資金だけでなく、「研究開発から生産ライン、ソフトウェアから基幹製造」まで実現する道筋とリソースも獲得しています。

この流れは伝統的な資本市場とも重なります。2025年6月、KraneSharesがグローバル・ヒューマノイド&組込みAI指数ETF(KOID)をローンチした際、OpenMindとRoboStoreが共同カスタマイズしたヒューマノイド「Iris」がNASDAQのオープニングベルを鳴らし、同取引所史上初の「ロボットゲスト」として式典に参加しました。これは技術と金融の物語が重なった象徴であり、「機械資産がどのように評価・決済されるか」に関する公のシグナルともなりました。
Pantera CapitalのパートナーであるNihal Maunder氏は、次のように述べています:
「オープンな環境でインテリジェントなマシンを動かすには、オープンなインテリジェンスネットワークが必要です。OpenMindがロボット分野で成し遂げていることは、LinuxがソフトウェアにもたらしたことやEthereumがブロックチェーンにもたらしたことと同じです。」
リサーチから製造まで
OpenMind創業者のJan Liphardt氏は、スタンフォード大学准教授であり、元バークレー教授としてデータと分散システムの広範な研究経験をもち、学術とエンジニアリング双方に深く根ざしています。氏はオープンソースの再利用を提唱し、独自システムを監査・追跡可能な仕組みへと置き換え、AI・ロボティクス・暗号の学際融合を推進しています。
OpenMindのコアチームはOKX Ventures、Oxford Robotics Institute、Palantir、Databricks、Perplexityなど出身で、ロボット制御、認識・ナビゲーション、マルチモーダルやLLMオーケストレーション、分散システム、ブロックチェーンプロトコルといった重要分野をカバー。加えて、スタンフォード・ロボティクス責任者Steve Cousins氏、Oxford Blockchain CenterのBill Roscoe氏、Imperial CollegeのセキュリティAI教授Alessio Lomuscio氏らのアドバイザリーボードが、ロボットの「安全・コンプライアンス・信頼性」を担保しています。
OpenMindのソリューション:2層アーキテクチャと単一秩序システム
OpenMindは、ロボットがデバイスやメーカー、さらには国境を越えて協働・通信できる再利用型インフラを構築しています:
デバイス側:物理ロボット向けAIネイティブOS「OM1」を提供し、知覚から実行まで全てをシームレスにつなぎ、各種マシンが環境を理解しタスクを遂行する基盤を実現。
ネットワーク側:分散型協働ネットワーク「FABRIC」を開発し、アイデンティティ、タスク割り当て、通信機構を提供。協働時にロボット同士が相互認識し、タスクの割当や状況の共有が可能となります。
この「オペレーティングシステム+ネットワーク層」の融合により、ロボットは単独動作にとどまらず、プロセスを同期させ、複雑なタスクを一つの協働ネットワークで完遂できるようになります。
OM1:物理世界のAIネイティブオペレーティングシステム
スマートフォンでアプリを動かすためにiOSやAndroidが必要なように、ロボットがAIモデルを実行し、センサーデータを処理し、推論や意思決定、動作を行うには専用OSが不可欠です。
そこでOM1が登場します。OM1は、現実世界のロボット向けAIネイティブOSで、様々な環境での知覚、理解、計画、タスク遂行を可能にします。従来のクローズドな制御システムと違い、OM1はオープンソース・モジュール化・ハードウェア非依存設計で、ヒューマノイドから四足歩行、車輪移動型やロボットアームまで様々な形態に対応します。
4つのコア構成要素:知覚から実行まで
OM1はロボット知能を「知覚→記憶→計画→実行」という4段階に体系化。それぞれを完全にモジュール化し、統一データ言語で結ぶことで、自由な組み換え・交換・検証可能な知的機能を実現しています。
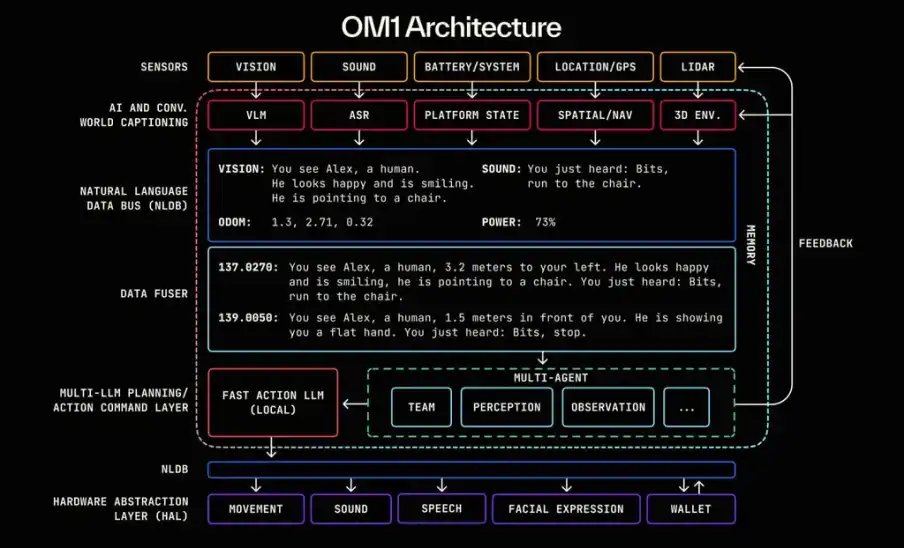
OM1アーキテクチャ
具体的には、OM1の7層アーキテクチャは下記のように動作します:
センサーレイヤー:カメラ、LiDAR、マイク、バッテリー残量、GPSなど、多様なモーダルから情報を取得します。
AI+ワールドキャプショニング層:マルチモーダルモデルが映像・音声・ステータス情報を自然言語記述(例:「あなたの前で手を振る人」)に変換します。
自然言語データバス(NLDB):全知覚データをタイムスタンプ付き言語断片に変換し、各モジュール間で伝達します。
データ融合器:複数ソースの入力を統合し、意思決定用の全体コンテキスト(プロンプト)を生成します。
マルチAI計画・意思決定層:複数のLLMがコンテキストを読み取り、ブロックチェーン上のルールも踏まえて行動計画を出力します。
NLDBダウンストリームチャンネル:決定内容を言語中間層を介してハードウェア実行系に伝達します。
ハードウェア抽象化層:言語指令を低レベルの制御コマンドに変換し、ハードウェア(移動・音声出力・トランザクション等)の実行を実現します。
迅速な導入と広範な展開
OM1は、「想い」を「ロボットが実際に動かせるタスク」へすばやく変換できる開発パイプラインを構築しました。開発者は大規模言語モデルで自然言語の目標や条件を入力し、これまで数か月かかったコーディングを数時間で再利用可能な機能パッケージとして生成できます。LiDARやビジョン、音声などマルチモーダルなパイプラインもネイティブ連携し、複雑なセンサーフュージョンコードも不要。GPT-4o、DeepSeek、主要なVLMなどのモデルが事前統合されているため、音声入出力もすぐ利用可能です。ROS2やCyclone DDSともシステムレベルでフル互換し、ハードウェア抽象化層経由で「Unitree G1」、Go2、Turtlebot、各種ロボットアーム等にもシームレス統合。FABRICのID・タスク管理・ブロックチェーン決済とも直結し、ロボットは単体でもグローバル協働ネットワークにも柔軟に参加でき、利用毎の課金や監査も可能です。
OM1は各種現場シナリオで実証されています。四足歩行型のFrenchie(Go2)は2024年USS Hornet防衛技術展で複雑な現場タスクを完了し、ヒューマノイド型のIris(Unitree G1)はEthDenver 2025のCoinbaseブースで現場の人と機械とのインタラクションを実施。RoboStoreの教育プロジェクト(Unitree最大級の米国ディストリビューター)では、米国大学講義への導入により、同パラダイムが教育・研究現場にも展開されています。
FABRIC:分散型ヒューマンマシン協働ネットワーク
高い単体知能を持っていても、ロボット同士が信頼に基づき協働できなければ孤立します。現実的な断片化の根本は3点です。第一に、アイデンティティや位置情報の標準化・証明ができず「誰が・どこで・何をしているか」を外部が信頼できない。第二に、スキルやデータを多者間で安全に共有・呼び出し可能な統制経路がない。第三に、制御権や責任の境界が不明確で、運用・認可・検証の枠組みも事前定義や事後検証が困難。FABRICは分散型プロトコルによる検証可能なブロックチェーン上のIDをロボット・オペレーターに付与し、タスク公開・マッチング・暗号通信・実行履歴・自動決済などすべてネットワーク上のIDに紐づけて一元管理。これにより協働は「一時的な接続」から「記録に基づく制度」へ進化します。
運用では、FABRICは「位置情報・接続・スケジューリング」を一体化したネットワーク層として機能します。IDと所在は随時署名・検証され、ノード間に「自明な信頼関係」が自動構築。P2Pチャンネルはオンデマンド暗号トンネルとして、公開IPや複雑な設定不要で遠隔操作・監視が可能。タスク公開から受諾、実行、検証まで標準化され記録されるため、成果物の利益分配やデポジット返金、コンプライアンスや保険証明のための「誰が・いつ・どこで・何を」も全て検証可能となります。これにより、企業は遠隔地の設備管理、自治体は清掃や点検・配送のロボットサービス化、車両はリアルタイムで道路状況共有と3Dスキャン・建物調査・保険証拠収集のロボット派遣まで多様な用途を実現できます。
アイデンティティ・タスク・決済の一元管理により、協働範囲の事前明示、実行履歴の事後検証、機能利用コストと便益の定量化も可能。長期的にFABRICは「機械知能のアプリ流通レイヤー」へ進化し、機能が認可条件付きで世界を循環、利用データがモデル・戦略に還元され、信頼境界内でネットワーク全体が継続的に自己進化していきます。
Web3が「オープンネス」を機械社会に書き込む
ロボティクス業界は、ハード・アルゴリズム・ネットワークがクローズドなスタック化により、少数のプラットフォームに急速に集約しつつあります。分散化の価値は、ブランドや地域を問わずあらゆるロボットが同じオープンなネットワーク上で協働し、機能交換や決済を実現できる点にあります。OpenMindはこれをブロックチェーン基盤で設計。各ロボットやオペレーターに、検証可能なハードウェアフィンガープリントや権限を持つユニークなブロックチェーン上のID(ERC-7777準拠)を付与。タスクは公開ルール下で発注・入札・マッチングされ、実行時には時間・場所付きでブロックチェーン上に暗号証明を生成。タスク完了後はスマートコントラクトが利益・保険・デポジットを自動決済し、成果もリアルタイムで検証可能。新しい機能もコントラクトで呼び出し回数や適用デバイスを規定し、知財を守りつつグローバル流通を実現。こうしてロボット経済は誕生時から「反独占性」「コンポーザブル性」「監査性」を内蔵し、機械社会のプロトコル層にオープンネスがデフォルトで書き込まれています。
実体知能が孤立を脱するために
ロボットは展示会の場から日常生活へ浸透しつつあります。病院での病棟監視、キャンパスでのスキル習得、都市での点検やモデリングまで、活躍の場が拡大しています。真の課題はモーターの強化ではなく、異なる供給元のマシン同士が相互信頼し、情報を交換し協働できるかという点です。そして、技術面だけでなく、流通・供給網がスケーラビリティのカギとなります。
OpenMindの実装戦略は、パラメータ強化ではなくチャネル開拓から着手。Unitree最大級の米国ディストリビューターRoboStoreとの提携で、OM1を標準カリキュラムや実験キット化し、ハード・ソフト一体で米国内数千大学に同時展開。教育分野は最も安定した需要源であり、OM1を継続的な開発・応用パイプラインへ組み込んでいます。
さらに、OpenMindは投資家エコシステムを駆使してプラットフォーム型「ソフトウェア輸出チャネル」を構築。Piをはじめとする成熟した暗号エコシステムの活用により、開発者・ユーザー・有料顧客が好循環する新規エコシステムを醸成。教育チャネルの安定供給とプラットフォーム流通の大規模需要により、OM1や上位アプリケーションの再現性ある拡大基盤を確立しました。
Web2時代、ロボットは単一ベンダーのクローズドスタックに閉じ込められ、機能やデータは横断できませんでしたが、OpenMindはカリキュラム標準と流通基盤を両輪に、オープンネスをデフォルトへ。単一のシステムが大学から産業に拡張され、プラットフォームネットワークを介した拡大も加速。これにより大規模展開の出発点としてオープンネスが標準装備されます。
免責事項:
- 本記事はBlockBeatsからの転載であり、著作権は原著者BlockBeatsに帰属します。転載にご異議のある場合はGate Learnチームまでご連絡ください。速やかに所定手続きにて対応します。
- 免責事項:本記事に示される見解・意見は著者個人のものであり、いかなる投資助言も含みません。
- 本記事の他言語翻訳はGate Learnチームの独自提供であり、Gateの明記無しには転載・配布・盗用を禁じます。
関連記事

VirtualsのAIXBTとは何ですか?AIXBTについて知る必要があるすべてのこと

Virtuals Protocol: AIエージェントのトークン化

Tars AIとは何ですか?AIとWeb3統合の未来を探る

OLAS: 10億人のAIエージェントへ

クリプトナラティブとは何ですか?2025年のトップナラティブ(更新版)
